针对建筑钢构、煤机、工程机械、船舶等行业的坡口切割工艺领域,大界与梅卡曼德联合推出了新一代3D坡口切割解决方案,基于图特征约束的粗精一体定位方法,摒弃了传统激光多次扫描寻边定位,实现拍照一次即刻全局定位,自动生成切割轨迹,自适应复杂环境和各种类型工件,满足柔性化生产。
在钢结构加工领域,平面工件的二次加工是一大类机加内容,主要是对下料后的边缘进行开坡口、铣削R角、打磨去毛刺等。但工件经过前道加工后,常因热变形出现整体略微屈曲,边缘与图纸存在偏差等缺陷。
目前,与图纸相比略有变形(弯曲或边缘偏移)的加工定位,主要通过以下三种方式:
方式一:人工逐点示教
需要固定工装,当工件一致性较差或种类繁琐时,每个工件均需逐个示教,效率极低。
方式二:人工逐点示教线激光拍照位置+线激光扫描
同样具有人工示教的缺陷,仅是将触碰的示教方式转变为线激光测量定位示教的方式,部分减少了人工凑近观察的工作量。
方式三:结构光相机粗定位+线激光扫描
现阶段平面工件定位自动化的主流方法,主要通过图纸与结构光相机点云粗匹配获得线激光精定位拍照位置,解决了工件不一致或变形和逐个示教的问题。但线激光逐点测量耗时,对低于粗定位最小精度的短边(通常为20-50mm),会因为粗定位结果偏差,精定位扫描不到所需边导致定位失败。
面对小批量多品种的工件,以上方式已经不能适应行业的柔性化生产需求。大界作为中国领先的智能机器人系统公司,在图形学、智能感知、工艺算法等领域具备深厚的技术积累及行业经验。梅卡曼德机器人拥有先进的AI+3D视觉技术,自研的工业级3D相机已在汽车、物流、重工等众多领域规模化落地,连续三年市场占有率第一,是国家级专精特新“小巨人”企业。双方针对行业现存的生产痛点,紧密合作,基于激光条纹结构光的成像特点及梅卡曼德结构光相机的双目配置,联合开发了基于图特征约束的粗精一体定位方法,为行业提供了创新的解决方案。

大界使用了深度图结合双目原始灰度图的方法,对梅卡曼德高分辨率、低波动的点云进行了定制化的处理,采用图纸特征驱动的拟合方式,对构件缺陷与点云噪声进行了滤波,对板件弯曲与尺寸形变进行了自适应,从而在视觉系统内,做到了原始像素密度级别的拟合精度。
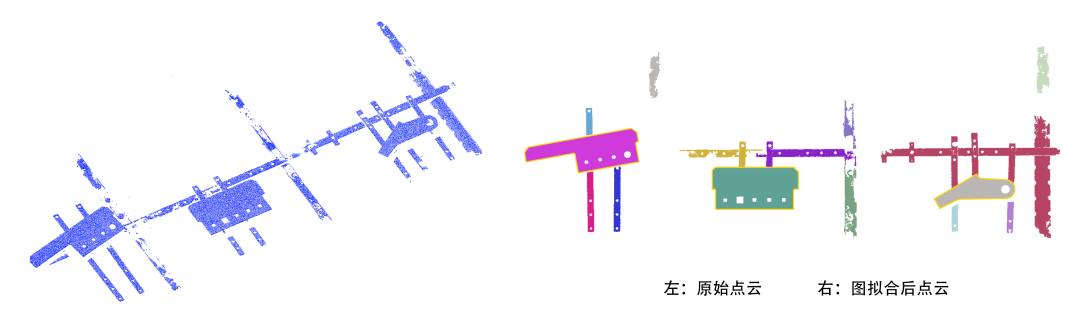
原始点云与图拟合
在获得了实际工件的真实边缘轮廓后,使用大界自研的几何算法平台进行工件重构,并根据输入的图纸特征信息(标注的dxf或带坡口信息的step文件等),自动调用切割或打磨工艺库,生成工艺路径。工艺路径通过RoBIM Cloud平台自动生成机器人的轨迹,对奇异点、限位与碰撞进行了规避,并通过数字孪生(DT)下发至机器人设备进行实际生产。
粗精一体的方法支持多工件自主识别,支持直线、圆弧及混合形态的工件识别,支持内外边识别,工件正反面、对称件识别;支持多品牌机器人(FANUC、KUKA、ABB、安川等),支持多工艺(火焰切割、等离子切割、自由边打磨、去毛刺),支持多构型(单工位、双工位、倒挂、龙门),充分满足客户的定制化需求。
图纸库举例
在典型工件的等离子切割上,双工作台自动上下料的粗精一体方案能够实现切割机器人85%以上利用率及75%以上的燃弧率,10小时典型工班切割米数达到850米以上(线激光定位方案同样的零件一般在250-350米,人工一般80-120米),大幅度提升了生产节拍与效率。
*切割机器人燃弧率=切割机器人纯切割时间/生产节拍
*切割机器人利用率=切割机器人运行时间/生产节拍
大界双工位等离子切割+自动上下料方案
上海某建筑钢结构企业
项目背景:
工件生产批量少,需要频繁更换类型;
传统定位方式需要人工示教,效率低下, 容易出现定位偏差问题,影响加工精度。
解决方案:
提供双工位火焰切割机器人方案,采用粗精一体视觉定位,免工装,对工件摆放位姿无要求,不受工件切割边数、尺寸和形状的影响,适应柔性生产;
在RoBIM软件中批量导入图纸,20秒即可完成坡口参数设置,自动识别图纸标注并生成工艺模型,摆脱对操作人员的依赖,实现一键加工;
结合大界视觉算法,3D相机拍照一次即可完成工件的精定位,自主生成路径规划,自动调用精准工艺参数进行自适应切割,保证切割质量和精度;
双工位无缝衔接,连续生产8小时,切割效率约为人工的2倍,支持单台面多工件加工,免翻面,正反坡口一次成型。
河南某龙头煤机制造企业
液压支架的工件尺寸与种类变化繁多,需要对不同规格的零件坡口进行加工;
来料工件采用共边下料,工件外轮廓存在小短边、小弧边,需要视觉能够适应匹配切割;
作为行业领头羊,客户希望能引进支持3D模型导入和直接对接工艺库的免示教智能解决方案来释放传统示教操作的生产瓶颈,持续引领高端装备制造的发展。
解决方案:
提供全自动等离子机器人坡口切割工作站,RoBIM软件内嵌坡口切割、打磨专家库,机器人自动调用工艺库配置切割参数,实现工件的免示教自动上下料、切割、打磨的智能化生产;
粗精一体视觉定位采用行业领先的3D视觉定位算法,支持小批量、多品种来料,柔性化程度高,15秒直接对工件精定位切割,最大化切割机器人燃弧率,尤其针对存在小短边小弧边坡口的产品,可实现精准定位,保证切割质量;
支持二三维数据对接,直接识别坡口几何信息,无需人工设置坡口参数。支持折弯三维数据展平及展平延展补偿,展平后也支持对轮廓二次编辑;
开放端口,可与招标方MES系统通讯,提供生产设备数据,实时监控设备的工作状态、运行参数及设备能耗。能对接MES进行生产排产、排程计划信息,实现生产任务的自动报工;
相较于线激光扫描定位方式,该方案切割效率提升2倍,生产节拍提升30%,相较于人工,效率提升近10倍。
项目背景:
工件尺寸及规格多样、切割工艺复杂、质量要求高;
传统示教繁琐,高度依赖熟练工,工艺要求高,示教精度难控制,效率较低;
实际零件存在下料偏差,单一程序重复切割导致误差累积,影响后续的焊接质量。
解决方案:
率先采用了大界双工位火焰切割标准工作站,可快速落地投产,实现小批量多品种的零件坡口的免示教切割;
粗精一体视觉定位,可自适应弯曲变形的工件,自动纠偏来料误差,加工精度可满足后道自动工艺需求;
在RoBIM软件中直接对接二维数据,一键设置参数化坡口,自动推荐工艺参数,不受工人专业度影响,确保切割质量。

目前,整个行业鱼龙混杂,方案良莠不齐,市场存在无序竞争的现象,因此更需要能掌握核心技术的企业和专业的厂商携手并进,合力攻坚,提供更先进的产品和服务。大界与梅卡曼德都是各自领域的头部企业,本次强强联合,对于促进和引领行业的高质量发展具有重要意义,后续双方也将在更多的工业场景和应用中开发更好的产品,提供创新的解决方案,服务行业的数智化转型。